
Angewandte Technisch-Kognitive Systeme: Unterschied zwischen den Versionen
Vy9905 (Diskussion | Beiträge) |
Bs4370 (Diskussion | Beiträge) |
||
| (16 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) | |||
| Zeile 6: | Zeile 6: | ||
Adressierte Grundlagen der maschinellen Intelligenz sind vornehmlich die maschinelle Wahrnehmung sowie das Situationsverstehen und die Verhaltensentscheidung. Methoden des maschinellen Lernens und der probabilistischen Inferenz werden dabei für alle Komponenten erforscht und angewandt. | Adressierte Grundlagen der maschinellen Intelligenz sind vornehmlich die maschinelle Wahrnehmung sowie das Situationsverstehen und die Verhaltensentscheidung. Methoden des maschinellen Lernens und der probabilistischen Inferenz werden dabei für alle Komponenten erforscht und angewandt. | ||
Verfahren der Systemevaluierung und Validierung bilden einen zusätzlichen Schwerpunkt im Rahmen der angewandten Forschung. | Verfahren der Systemevaluierung und Validierung bilden einen zusätzlichen Schwerpunkt im Rahmen der angewandten Forschung. | ||
| − | Autonome Fahrzeuge wie CoCar und CoCar-Zero, autonome Shuttles wie Anna und Ella, mobile Roboter, wie der Assistenzroboter Hollie, die Lauron Laufmaschinen oder der Inspektionsroboter Kairo bilden dabei wertvolle Integrations- und Evaluierungsplattformen für die angewandte Forschung. Sie werden in enger Kooperation mit dem FZI weiterentwickelt und für die gemeinsame Forschung und Lehre genutzt. | + | Autonome Fahrzeuge wie CoCar NextGen, CoCar, und CoCar-Zero, autonome Shuttles wie Anna und Ella, mobile Roboter, wie der Assistenzroboter Hollie, die Lauron Laufmaschinen oder der Inspektionsroboter Kairo bilden dabei wertvolle Integrations- und Evaluierungsplattformen für die angewandte Forschung. Sie werden in enger Kooperation mit dem FZI weiterentwickelt und für die gemeinsame Forschung und Lehre genutzt. |
|Beschreibung EN=The research focuses on technologies of applied machine intelligence. Based on fundamental research new systems such as autonomous service robots, autonomous vehicles or assistance systems with cognitive capabilities are to be realized. The use of these so-called technical-cognitive systems takes place primarily in the context of highly automated, efficient and intermodal mobility; connected, automated production and logistics as well as the interactive support of the user in everyday situations. | |Beschreibung EN=The research focuses on technologies of applied machine intelligence. Based on fundamental research new systems such as autonomous service robots, autonomous vehicles or assistance systems with cognitive capabilities are to be realized. The use of these so-called technical-cognitive systems takes place primarily in the context of highly automated, efficient and intermodal mobility; connected, automated production and logistics as well as the interactive support of the user in everyday situations. | ||
| Zeile 22: | Zeile 22: | ||
{|cellspacing="4" cellpadding="4"| | {|cellspacing="4" cellpadding="4"| | ||
|width="25%" valign="top"| | |width="25%" valign="top"| | ||
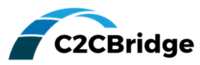
| − | <h4>CoCar NextGen | + | <h4>CoCar NextGen auf IEEE ITSC 2023 </h4> |
| − | + | [[Datei:CCNG_ITSC_Group.jpg|420px|boder|right| CoCar NextGen at ITSC 2023 © Sven Ochs, FZI Forschungszentrum Informatik]] | |
| + | Auf der 2023 International Conference on Intelligent Transportation Systems haben wir unser neuestes vernetztes und autonomes Forschungsfahrzeug vorgestellt: '''''CoCar NextGen'''''. <br> | ||
| − | + | Basierend auf einer Audi A6 Plattform ist das Fahrzeug mit der neuesten Sensor- und Rechentechnologie ausgestattet, um unsere autonome Fahrsoftware zu unterstützen. CoCar NextGen wird unsere Forschung im Bereich des vernetzten und autonomen Fahrens durch Messungen und Testfahrten in realen Situationen erleichtern. <br> | |
| − | |||
| − | + | Das Fahrzeug verfügt über neun Kameras, zwölf LiDAR-Sensoren, drei Radarsensoren und ein verbessertes GPS-System. | |
| − | + | Unsere Software für das autonome Fahren wird von einem integrierten Hochleistungsserver betrieben, der durch mehrere Grafikprozessoren ergänzt wurde, um unsere KI-Komponenten zu verbessern. <br> | |
| − | + | Für die Kommunikation mit anderen Fahrzeugen und intelligenter Infrastruktur, wie unserem [https://taf-bw.de/ Testfeld Autonomes Fahren] in Karlsruhe, besitzt CoCar NextGen moderne Vehicle-to-Everything (V2X) Module. | |
| − | + | Darüber hinaus haben wir auf der ITSC 2023 acht Paper vorgestellt, um unser Engagement für die Weiterentwicklung von autonomen und vernetzten Fahrsystemen zu unterstreichen. <br> | |
| + | Wenn auch Sie daran interessiert sind, einen Beitrag zu unseren Forschungsbemühungen im Zusammenhang mit CoCar NextGen oder unserem Portfolio von autonomen, vernetzten Fahrzeugen und intelligenter Infrastruktur zu leisten, laden wir Sie ein, sich bezüglich Hiwi-, Bachelor- und Master-Arbeiten [https://karriere.fzi.de/Vacancies/908/Description/1 bei uns melden]. | ||
| − | [[Datei:Ccng1.jpg|600px|boder|left| CoCar NextGen at ITSC 2023]] [[Datei:Ccng3.jpg|600px|right| CoCar NextGen during Testdrive]] | + | [[Datei:Ccng1.jpg|600px|boder|left| CoCar NextGen at ITSC 2023 © Sven Ochs, FZI Forschungszentrum Informatik]] [[Datei:Ccng3.jpg|600px|right| CoCar NextGen during Testdrive © Sven Ochs, FZI Forschungszentrum Informatik]] |
| + | |} | ||
| + | |||
| − | |||
__NOTOC__ | __NOTOC__ | ||
<!-- | <!-- | ||
| Zeile 93: | Zeile 95: | ||
<li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Rupert_Polley Aerial Image Segmentation with Deep Neural Networks for Autonomous Driving]</li> | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Rupert_Polley Aerial Image Segmentation with Deep Neural Networks for Autonomous Driving]</li> | ||
<li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Daniel_Bogdoll Anomaly Detection for Autonomous Driving]</li> | <li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Daniel_Bogdoll Anomaly Detection for Autonomous Driving]</li> | ||
| + | <li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Daniel_Bogdoll Generative World Models for Future Predictions]</li> | ||
<li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Marc_Uecker Deep Learning based 3D Environment Perception for Autonomous Vehicles]</li> | <li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Marc_Uecker Deep Learning based 3D Environment Perception for Autonomous Vehicles]</li> | ||
<li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Marc_Uecker Sensor-setup agnostic Machine Learning Perception for Autonomous Vehicles]</li> | <li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Marc_Uecker Sensor-setup agnostic Machine Learning Perception for Autonomous Vehicles]</li> | ||
| Zeile 100: | Zeile 103: | ||
<li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Stefan_Orf Recognition of Sensor Data Discrepancies in Autonomous Vehicles and Smart Infrastructure]</li> | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Stefan_Orf Recognition of Sensor Data Discrepancies in Autonomous Vehicles and Smart Infrastructure]</li> | ||
<li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Melih_Yazgan Perception with Intelligent Traffic Infrastructure]</li> | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Melih_Yazgan Perception with Intelligent Traffic Infrastructure]</li> | ||
| + | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Marcus_Fechner Object Detection with Uncertainty to Tackle Shifted and Out-Of-Distribution Data]</li> | ||
</ul> | </ul> | ||
</td> | </td> | ||
| Zeile 169: | Zeile 173: | ||
<li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Marc_Zofka Distributed Virtual Reality (VR) and Simulation Frameworks for Validation and Verification of Autonomous Vehicles]</li> | <li style="margin-bottom: 0.5em">[https://www.aifb.kit.edu/web/Marc_Zofka Distributed Virtual Reality (VR) and Simulation Frameworks for Validation and Verification of Autonomous Vehicles]</li> | ||
<li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Helen_Gremmelmaier Simulation of Autonomous Driving and Behaviour Modelling of Vulnerable Road Users]</li> | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Helen_Gremmelmaier Simulation of Autonomous Driving and Behaviour Modelling of Vulnerable Road Users]</li> | ||
| + | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Daniel_Bogdoll Rare and challenging scenarios in simulation]</li> | ||
</ul> | </ul> | ||
</td> | </td> | ||
| Zeile 198: | Zeile 203: | ||
<li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Tim_Joseph Efficient Unsupervised Reinforcement Learning]</li> | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Tim_Joseph Efficient Unsupervised Reinforcement Learning]</li> | ||
<li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Ahmed_Abouelazm End-to-End autonomous driving using Reinforcement Learning]</li> | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Ahmed_Abouelazm End-to-End autonomous driving using Reinforcement Learning]</li> | ||
| + | <li style="margin-bottom: 0.5em">[https://aifb.kit.edu/web/Marcus_Fechner Generally Capable Autonomous Agents from Web-Scale Video Data]</li> | ||
</ul> | </ul> | ||
</td> | </td> | ||
Version vom 7. November 2023, 07:31 Uhr
Angewandte Technisch-Kognitive Systeme
 |
Sekretariat: |
Im Fokus der Forschung stehen Technologien der angewandten maschinellen Intelligenz. Basierend auf der Erforschung von Grundlagen sollen neue technische Systeme wie autonome Fahrzeuge, autonome Serviceroboter, oder Assistenzsysteme mit kognitiven Fähigkeiten realisiert werden. Die Anwendung dieser so genannten technisch-kognitiven Systeme findet primär im Kontext der hochautomatisierten, effizienten und intermodalen Mobilität, der vernetzten automatisierten Produktion und Logistik sowie der interaktiven Unterstützung des Benutzers in Alltagssituationen statt.
Adressierte Grundlagen der maschinellen Intelligenz sind vornehmlich die maschinelle Wahrnehmung sowie das Situationsverstehen und die Verhaltensentscheidung. Methoden des maschinellen Lernens und der probabilistischen Inferenz werden dabei für alle Komponenten erforscht und angewandt. Verfahren der Systemevaluierung und Validierung bilden einen zusätzlichen Schwerpunkt im Rahmen der angewandten Forschung. Autonome Fahrzeuge wie CoCar NextGen, CoCar, und CoCar-Zero, autonome Shuttles wie Anna und Ella, mobile Roboter, wie der Assistenzroboter Hollie, die Lauron Laufmaschinen oder der Inspektionsroboter Kairo bilden dabei wertvolle Integrations- und Evaluierungsplattformen für die angewandte Forschung. Sie werden in enger Kooperation mit dem FZI weiterentwickelt und für die gemeinsame Forschung und Lehre genutzt.
CoCar NextGen auf IEEE ITSC 2023 Auf der 2023 International Conference on Intelligent Transportation Systems haben wir unser neuestes vernetztes und autonomes Forschungsfahrzeug vorgestellt: CoCar NextGen. Basierend auf einer Audi A6 Plattform ist das Fahrzeug mit der neuesten Sensor- und Rechentechnologie ausgestattet, um unsere autonome Fahrsoftware zu unterstützen. CoCar NextGen wird unsere Forschung im Bereich des vernetzten und autonomen Fahrens durch Messungen und Testfahrten in realen Situationen erleichtern.
  |
- Ahmed Abouelazm
- Daniel Bogdoll
- Johannes Buyer
- Mohammd Karam Daaboul
- Jens Doll
- Marcus Fechner
- Tobias Fleck
- Martin Gontscharow
- Helen Gremmelmaier
- Daniel Grimm
- Dominik Heid
- Marc Heinrich
- Christian Hubschneider
- Tim Joseph
- Florian Kuhnt
- Karl Kurzer
- Nico Lambing
- Albert Lee
- Ferdinand Mütsch
- Sven Ochs
- Stefan Orf
- Stefan Orf/en
- Svetlana Pavlitskaya
- Nikolai Polley
- Rupert Polley
- Helen Schneider
- Albert Schotschneider
- Philip Schörner
- Philipp Stegmaier
- Marc Uecker
- Abhishek Vivekanandan
- Michael Weber
- Melih Yazgan
- Maximilian Zipfl
- Marc Zofka
- J. Marius Zöllner
- Maschinelles Lernen 1 - Grundverfahren, Vorlesung (findet statt im WS)
- Maschinelles Lernen 2 – Fortgeschrittene Verfahren, Vorlesung (findet statt im SS)
- Programmieren I: Java, Vorlesung (findet statt im WS)
- Programmierung kommerzieller Systeme - Anwendungen in Netzen mit Java, Vorlesung (findet statt im SS)
- Kognitive Automobile und Roboter, Seminar (findet statt im WS & SS)
- Projektpraktikum Kognitive Automobile und Roboter, Praktikum (findet statt im WS)
- Projektpraktikum Maschinelles Lernen, Praktikum (findet statt im SS)
 |
C2CBridge |
|
|
|
|
SPP 1835: Kooperativ interagierende Automobile |
|
|
SofDCar |
|
|
Testfeld Autonomes Fahren |